1、package
rospy
roscpp
std_msgs
geometry_msgs
tf2
tf2_ros
tf2_geometry_msgs
2、Pub
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
|
import rospy
import tf2_ros
import tf
from geometry_msgs.msg import TransformStamped
'''
发布方:发布两个坐标系的相对关系(车辆底盘:base_link , 雷达:laser)
流程:
1.导包
2.初始化ros节点
3.创建发布者对象
4.组织被发布的数据
5.发布数据
6.spin()
'''
if __name__ == "__main__":
rospy.init_node("static_pub")
pub = tf2_ros.StaticTransformBroadcaster()
ts = TransformStamped()
ts.header.stamp = rospy.Time.now()
ts.header.frame_id = "base_link"
ts.child_frame_id = "laser"
ts.transform.translation.x = 0.2
ts.transform.translation.y = 0.0
ts.transform.translation.z = 0.5
qtn = tf.transformations.quaternion_from_euler(0,0,0)
'''
第1个参数:围绕 X轴 的 翻滚度
第2个参数:围绕 Y轴 的 俯仰度
第3个参数:围绕 Z轴 的 偏航度
单位:rad
返回值:四元数的列表
'''
ts.transform.rotation.x = qtn[0]
ts.transform.rotation.y = qtn[1]
ts.transform.rotation.z = qtn[2]
ts.transform.rotation.w = qtn[3]
pub.sendTransform(ts)
rospy.spin()
|
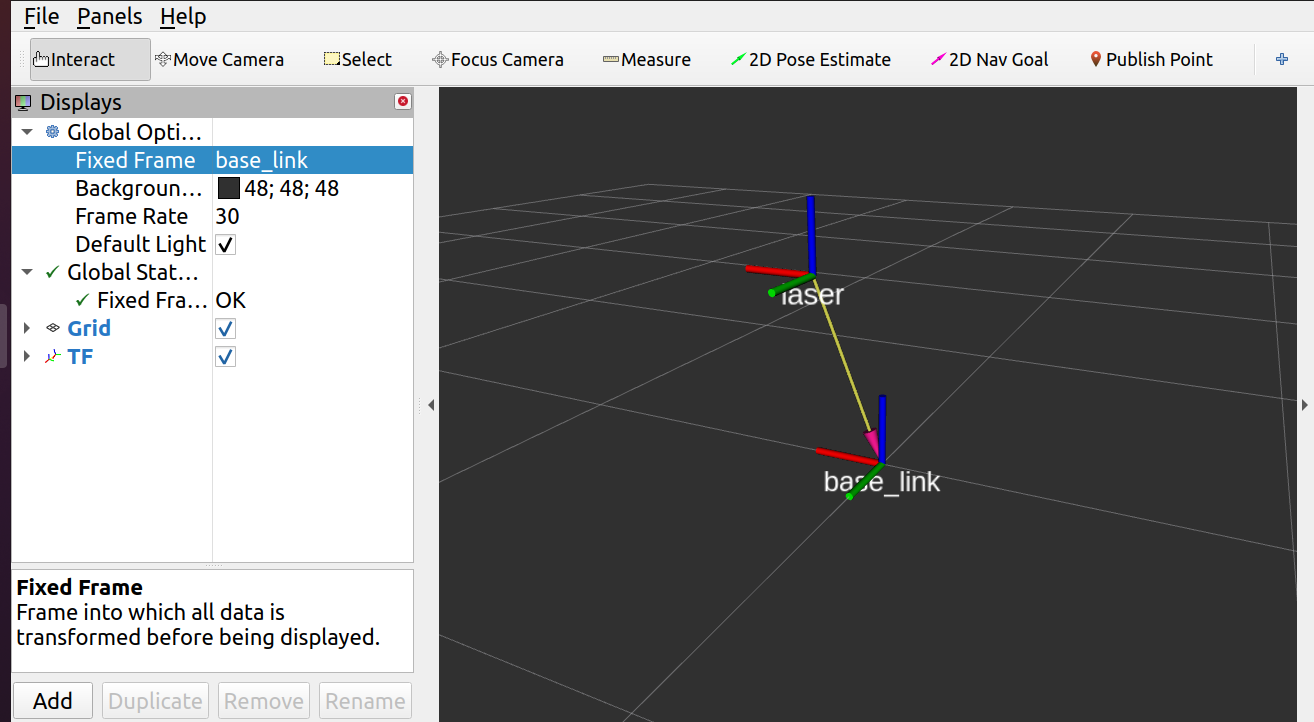
rviz:
3、Sub
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
|
import rospy
import tf2_ros
from tf2_geometry_msgs import tf2_geometry_msgs
'''
订阅方:订阅坐标变换消息,传入被转换的坐标点,调用转换算法
流程:
1.导包
2.初始化ros节点
3.创建订阅对象
4.组织被转换的坐标点
5.转换逻辑实现,调用tf封装的算法
6.输出结果
'''
if __name__ == "__main__":
rospy.init_node("static_sub")
buffer = tf2_ros.Buffer()
sub = tf2_ros.TransformListener(buffer)
ps = tf2_geometry_msgs.PointStamped()
ps.header.stamp = rospy.Time.now()
ps.header.frame_id = "laser"
ps.point.x = 2.0
ps.point.y = 5.0
ps.point.z = 3.0
rate = rospy.Rate(10)
while not rospy.is_shutdown():
try:
'''
param 1:被转换的座标点
param 2:目标坐标系
返回值:输出的目标点
ps:
问题:抛出异常 base_link 不存在
原因:转换函数调用时,可能还没有订阅到坐标系的相对关系
解决:try 捕获异常,并处理
'''
ps_out = buffer.transform(ps,"base_link")
rospy.loginfo("转换后的点(%.2f,%.2f,%.2f),参考的坐标:%s",
ps_out.point.x,
ps_out.point.y,
ps_out.point.z,
ps_out.header.frame_id
)
except Exception as e:
rospy.logwarn("异常:%s",e)
rate.sleep()
|
4、补充
当坐标系之间的相对位置固定时,那么所需参数也是固定的: 父系坐标名称、子级坐标系名称、x偏移量、y偏移量、z偏移量、x 翻滚角度、y俯仰角度、z偏航角度,实现逻辑相同,参数不同,那么 ROS 系统就已经封装好了专门的节点,使用方式如下:
1
2
3
4
5
| # rosrun tf2_ros static_transform_publisher x偏移量 y偏移量 z偏移量 z偏航角度 y俯仰角度 x翻滚角度 父级坐标系 子级坐标系
# 欧拉角:z偏航角度 y俯仰角度 x翻滚角度(单位:rad)
rosrun tf2_ros static_transform_publisher 0.2 0.0 0.5 0 0 0 base_link laser
|